


 AI2car Lab : Plateforme de développement pour les véhicules autonomes
AI2car Lab : Plateforme de développement pour les véhicules autonomes|
Département : Contrôle – Identification – Diagnostic Responsables scientifiques : Hugues GARNIER, Mayank JHA. Responsable technique : Clément FAUVEL. Financement : Fonds propres de Polytech Nancy (37 k€) et du CRAN (17 k€). |
Objectifs scientifiques
Le démonstrateur, en cours de mise en oeuvre début 2021, permettra de concevoir, de tester et de valider de nouveaux algorithmes d’intelligence artificielle, comme de nouvelles stratégies de commandes autonomes basées sur l’apprentissage par renforcement (reinforcement learning). Elle servira également au développement de nouvelles approches d’identification des systèmes non linéaires s’appuyant sur l’apprentissage profond (deep learning). Enfin le couplage des QCAR avec l’environnement virtuel permettra d’explorer le développement de méthodes d’apprentissage par transfert (transfer learning).
Description
Le démonstrateur, hébergée à Polytech Nancy, est constituée d’un super-ordinateur et de deux QCAR. La QCAR est la maquette à l’échelle 1/10 d’une voiture autonome. Elle est équipée du supercalculateur NVIDIA JETSON TX2 et de nombreux capteurs dont une caméra à 360°, une caméra RGDB et un Lidar. Elle comprend également un système de vision en temps réel et un système de guidage par laser (Figure 19)
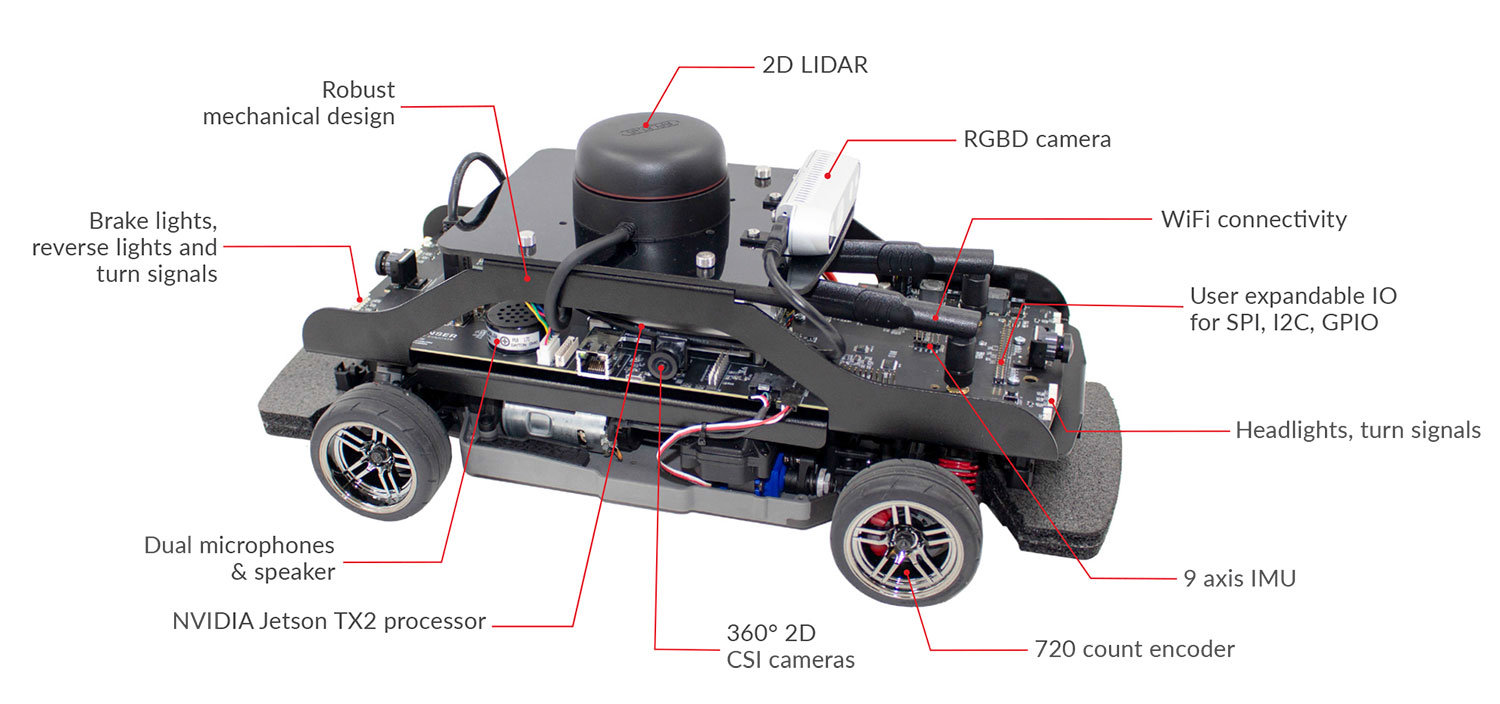
FIGURE 19 – La QCAR et ses principaux équipements
Ce démonstrateur possède une architecture ouverte et permet de développer les algorithmes d’intelligence artificielle pour se déplacer de manière autonome dans un environnement physique réel simulant des rues, des carrefours, des feux tricolores, des obstacles, etc. La plateforme permet aussi la simulation dans un environnement virtuel et son couplage avec le monde réel (Figure 20). S’appuyant sur un ensemble d’outils logiciels, la plateforme crée un environnement virtuel que la QCAR physique traitera comme un environnement effectivement réel (jumeau numérique).
Les environnements virtuels sont extrêmement modulables et permettent l’étude en simulation d’un seul agent ou de plusieurs agents (commande en flotte). La plateforme permet également de créer des environnements virtuels qui sont difficiles à étudier dans la réalité, comme par exemple la dégradation du moteur dans le domaine virtuel qui conduit à une défaillance totale du système et son investigation dans le domaine réel.

FIGURE 20 – Couplage entre l’environnement virtuel et les QCAR réels

