


 Arène de vol pour drones multirotors
Arène de vol pour drones multirotors|
Département : Contrôle – Identification – Diagnostic |
Objectif scientifique
Cette plateforme constitue un cadre d’application aux collaborations scientifiques du CRAN et du LORIA dans la thématique des drones, et plus précisément du contrôle du vol en formation. Elle est portée par les travaux de Laurent Ciarletta (Simbiot, CRAN), Didier Theillol (CID, CRAN), Jean-Christophe Ponsart (CID, CRAN). Les premiers travaux concernent la conception d’algorithmes de contrôle d’un consensus de suivi de leader dans des systèmes multi-agents de second ordre prenant en compte des défauts de communication (thèse de Juan Antonio Vazquez Trejo). Tous les agents doivent suivre les trajectoires d’un leader virtuel malgré les retards de communication variant dans le temps en fonction de la distance des agents. Des conditions basées sur les inégalités de matrice linéaire sont obtenues pour synthétiser un gain de contrôle qui garantit la stabilité de l’erreur de synchronisation. La plateforme a permis la validation des algorithmes par des expérimentations sur drones multirotors. Plus généralement elle constitue un cadre sécurisé pour les vols en intérieur avant des éventuelles expérimentations en extérieur.
Description
Cette plateforme est constituée d’une arène de vol de 5×7 m au sol sur une hauteur de 5 m, délimitée par une structure en aluminium rigide. Afin d’assurer la sécurité du matériel et des personnes, cette structure est équipée de filets et de tapis au sol. Elle est également équipée d’un système de Motion Tracking de 8 caméras Optitrack Prime 17W, permettant la localisation précise des drones dans l’espace (position et orientation). Elle est munie de plusieurs modèles de drones multirotors dont :
— 4 quadrotors Intel Aero
— Parrot Bebop 2 Power
— 1 DJI matrice 200 quadrotors
— 1 DJI matrice 600 hexarotor
Enfin, du matériel spécifique assure la sécurité lors de la manipulation des batteries Lipo : stockage dans armoire anti-feu, chargeur sécurisé et boite de recharge anti-feu.
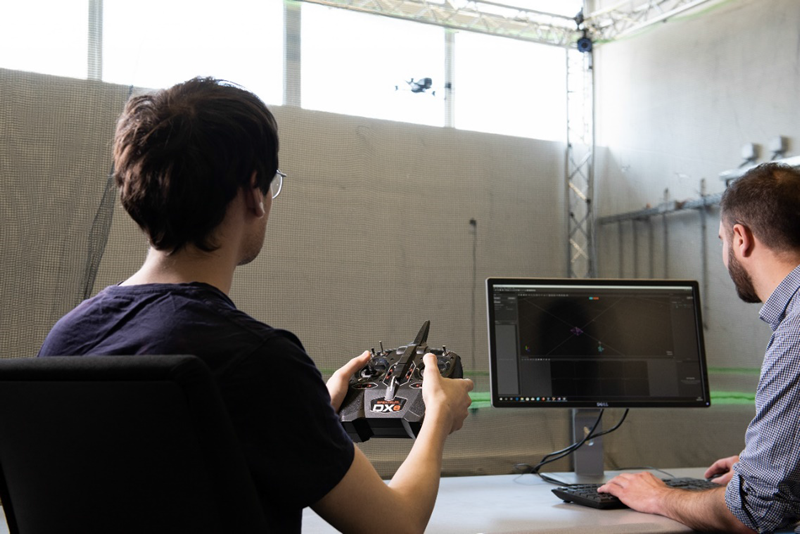
FIGURE 26 – Test de vol d’un drone multirotor (© Inria / Photo D. Betzinger)
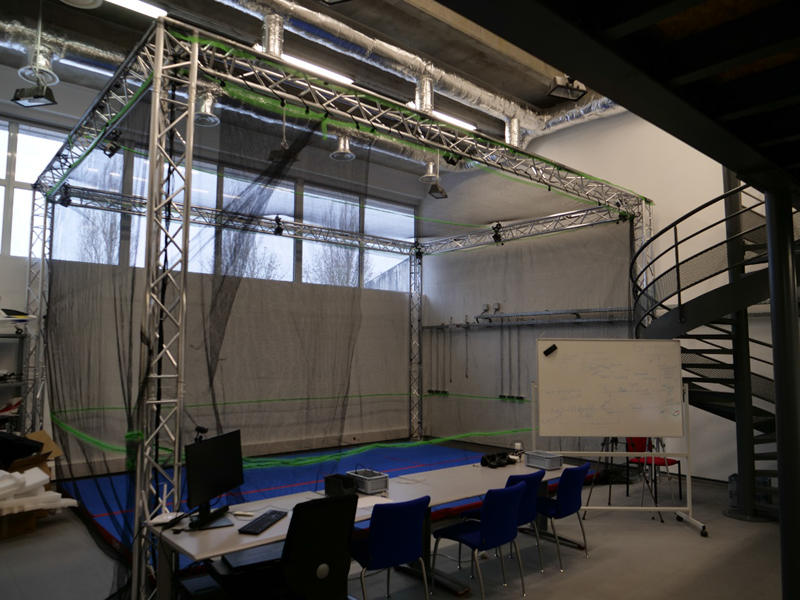
FIGURE 27 – Vue d’ensemble de la volière avec système de motion tracking

