


 Laboratoire sur câbles
Laboratoire sur câbles Département : Contrôle – Identification – Diagnostic. |
Objectifs scientifiques
La mise en oeuvre de cette plateforme s’inscrit dans le cadre de la collaboration scientifique entre le LORIA (D. Martinez, DR-CNRS) et le CRAN (M. Boutayeb, PR-UL). Il s’agit de réaliser un système de caméra robotisé afin d’étudier le comportement des insectes en vol libre.
En dépit d’un cerveau miniaturisé, les insectes sont capables de traitements sensori-moteurs sophistiqués amenant à des prouesses aéronautiques et des capacités sensorielles hors normes. Le vol des insectes reste encore mystérieux sur bien des points car la technologie actuelle ne permet pas l’étude des insectes en vol totalement libre. Cette plateforme vise à combler cette lacune en proposant le premier robot-laboratoire suspendu et actionné par des câbles, capable de suivre et d’interagir avec un insecte libre de ses mouvements. Les résultats obtenus en 2020 sur le suivi d’un insecte en vol libre, publiés dans une revue de premier plan en robotique [Acl.Ci.48], constitue une première mondiale qui a été largement reprise dans les publications de vulgarisation scientifique et la presse généraliste (Le Monde, Les Échos, Le Point)
Description
La plateforme, figure 31 et 32, se compose d’une petite nacelle se déplaçant dans un espace de 6m x 4m x 3m. La nacelle est un cube ouvert attaché à des câbles pris sur des enrouleurs. Des caméras permettant de localiser l’insecte et de mesurer des caractéristiques du vol y sont placées, ainsi qu’un système d’illumination infrarouge, d’alimentation électrique et de télétransmission. La loi de commande consiste à actionner les enrouleurs, déplaçant la nacelle, afin d’assurer une poursuite de trajectoire. Ce laboratoire sur câbles pose de multiples défis scientifiques et technologiques. En effet, le comportement dynamique de la cage est décrit par des équations différentielles non linéaires complexes et de grande dimension à six degrés de liberté avec des contraintes très fortes sur les tensions des câbles. La loi de commande tient compte des contraintes sur la tension des câbles de façon continue dans le temps, pour à la fois les maintenir tendus et éviter la cassure de ces derniers, tout en assurant une poursuite de trajectoire : celle de l’insecte, inconnue à l’avance. Vu la complexité du système et le nombre restreint de capteurs utilisés, la loi de commande doit garantir une robustesse par rapport aux incertitudes, retards de transmission et temps de calcul.
Perspectives
Le laboratoire sur câble a éveillé l’intérêt de plusieurs équipes de recherches, en particulier l’équipe Waves Flows Fluctuations du Labo Physique à l’ENS de Lyon. Une collaboration a été engagée pour l’étude du vol de papillons diurnes, dans l’optique d’une modélisation physique des écoulements et des turbulences. D’autre part, une thèse est en cours pour appliquer au contrôle et à la modélisation du robot à câble des techniques de l’Intelligence Artificielle (IA).
 |
| FIGURE 31 – Le laboratoire sur câbles |
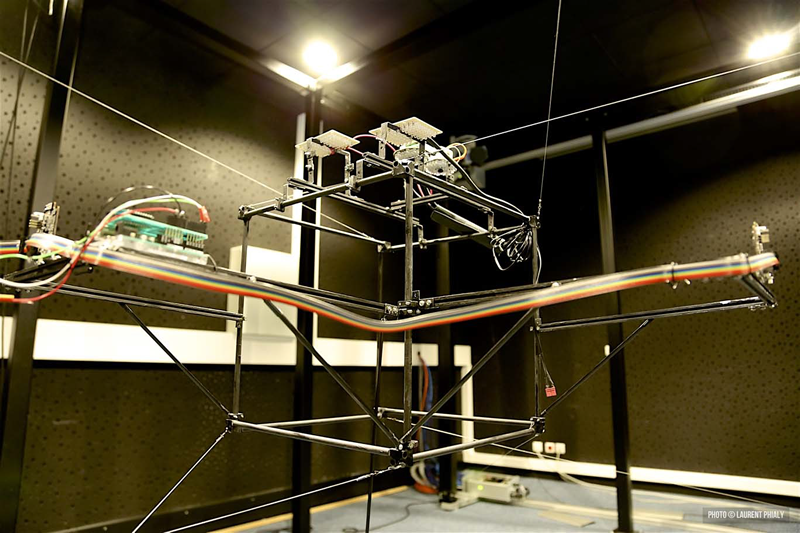 |
| FIGURE 32 – La nacelle se déplaçant avec les instruments de mesures |

