


 Visible Light Positioning
Visible Light PositioningDépartement : Ingénierie des Systèmes Éco-Techniques |
Contexte
La technologie Visible Light Communication (VLC ou communication par lumière visible) présente de nombreux avantages et attire l’attention d’acteurs divers (chercheurs, start-up, grands groupes, . . .). En effet, cette technologie utilise les infrastructures d’éclairage déjà déployées pour fournir à la fois l’éclairage et une communication sans fil, tout en bénéficiant d’une bande passante très large.
Parmi ces applications, les systèmes de positionnement intérieur (VLC-IPS) font l’objet de nombreux travaux.
Objectifs scientifiques
L’objectif de ce démonstrateur est de tester les performances de techniques de localisation indoor basés sur la technologie VLC. La position d’objets mobiles peut être estimée en utilisant deux grandes catégories d’algorithmes :
— les algorithmes de type « range-based » calculent la position de l’objet mobile en fonction de caractéristiques du signal reçu telles que la puissance, le temps d’arrivée, l’angle d’arrivée, etc. Ces caractéristiques du signal sont fortement affectées par l’observation, les réflexions sur les parois, la poussière ou la fumée potentiellement en suspension dans certains environnements intérieurs. Ces perturbations nuisent ainsi à la robustesse de ces algorithmes généralement reconnus pour leur précision ;
— les algorithmes de type « range-free » utilisent uniquement des informations de connectivité pour effectuer la localisation et les caractéristiques du signal ne sont pas prises en compte. Même si la précision obtenue au final est généralement moins bonne que celle obtenue par des approches de type range-based, cette approche n’est quant à elle pas (ou peu) sensible aux problèmes de réflexions de la lumière et aux problèmes d’occultations partielles.
Ce démonstrateur permet d’implémenter différents algorithmes et de valider de nouvelles approches. Nous nous intéressons notamment à définir un système de localisation indoor qui soit précis mais également robuste pour une exploitation dans des environnements fortement perturbés comme les mines souterraines.
Description
Le démonstrateur est constituée de 9 lampes à LED équipée chacune d’un modulateur programmable permettant d’injecter un signal dans la lumière émise. Ces lampes sont réparties sur une structure porteuse adaptable de 3m par 3m, à une hauteur de 2 m. Des récepteurs avec différentes caractéristiques (sensibilité, angle de vue, ...) peuvent être utilisés pour tester les performances de chaque technique de localisation indoor. Le démonstrateur offre aussi des outils de visualisation, d’acquisition et de conversion des signaux.
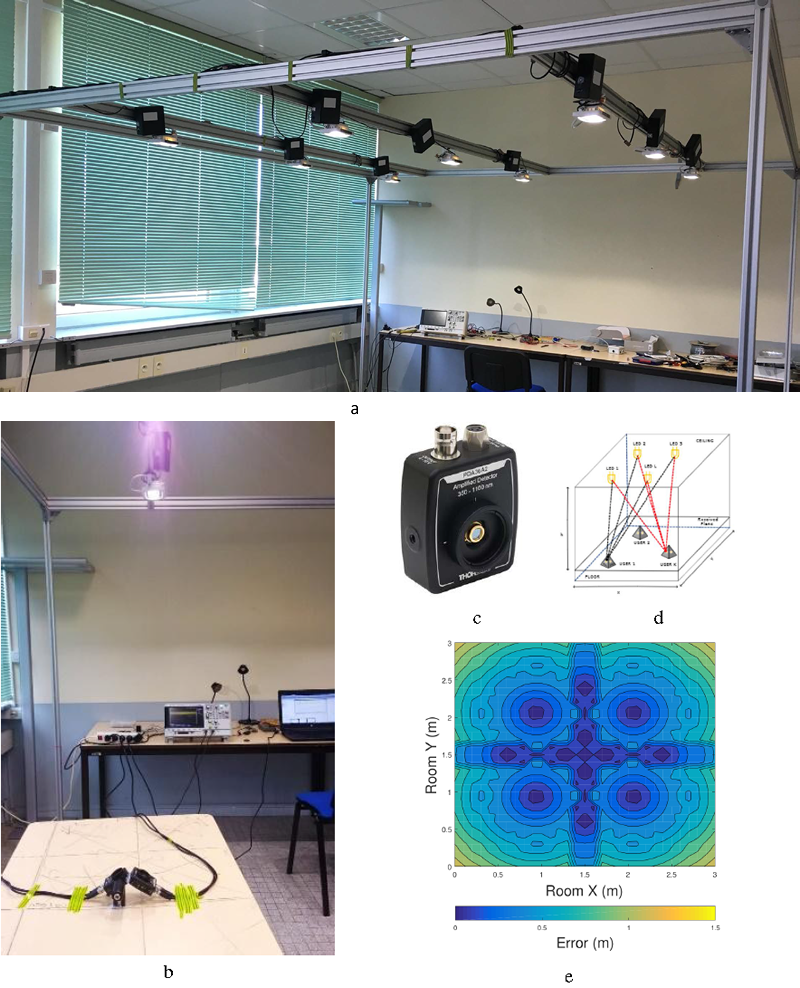 |
| FIGURE 43 – Le dispositif expérimental (a et b), le capteur (c). Principe du positionnnement (d) et précision (e) |

