


 TRACILOGIS – PIM : plateforme d’imagerie multimodale
TRACILOGIS – PIM : plateforme d’imagerie multimodale | Départements : Ingénierie des Système Éco-Techniques – Biologie, Signaux et Systèmes en Cancérologie et Neurosciences Responsables scientifiques : David BRIE, Hind BRIL Responsable technique : Rémi PANNEQUIN Financement : 563 k€ : CPER 2007-2013, CPER Cyber-Entreprises 2015-2020, ANR OPTIFIN, FUI TRISPIRABOIS. 1 an ingénieur CDD : CNRS (2017) Thèses associées 2016–2021 : Leila BELMERHNIA (2017) ; Yingying SONG (2018) ; Ludivine NUS (2019) ; Radouane DAHBI (en cours), Clémence PREVOST (2021). |
Contexte
Acquisition et mise en forme des données ; développement de méthodes de segmentation, d'identification, de classification, de modélisation de connaissances et de génération automatique de contours, traitement d'images hyperspectrales (démélange, décovolution, fusion)
Le projet de plateforme d’imagerie multimodale (PIM) rassemble dans un même lieu, un ensemble unique d’instruments d’imagerie à vocation industrielle. Il a pour ambition de permettre à la communauté Signal Image Vision des GDR ISIS et la communauté du pilotage des systèmes de production du GDR MACS d’accéder à cet ensemble d’instruments en prenant en charge la production de données expérimentales acquises dans des conditions maîtrisées selon un protocole conçu et défini par les utilisateurs potentiels. Ces données doivent permettre de tester et valider des modèles et algorithmes de traitement d’images et de vision par ordinateur. À titre d’exemples, on peut mentionner :
— l’imagerie hyperspectrale (démélange, classification, super-résolution, déconvolution) ;
— la reconstruction 3D à partir de caméra RGB-D;
— la reconstruction 3D en tomographie à Rayon X;
— la reconstruction 3D de nuages de points obtenus par LIDAR terrestre ;
— la fusion de données multimodales ;
— l’apport de la multimodalité pour la caractérisation de texture ;
— l’apport de la multimodalité pour le contrôle non destructif.
Un site web détaille les caractéristiques techniques des équipements, la gestion des demandes d’acquisitions ou de traitements sur site ou a distance, et les modalités de gouvernance. Cette plateforme s’intègre au réseau TRACILOGIS (TRAÇabilité, Identification, contrôle intelligent pour la chaîne logistique du bois) en fournissant des outils de contrôle non-destructif pour identifier et évaluer la qualité des produits, et aider à la prise de décision dans le pilotage des flux.
Objectifs scientifiques
Il s’agit de pouvoir analyser comment ces systèmes se comportent dans des conditions proches de celles des systèmes de contrôle en ligne de matériau. Un des ojbjectifs du projet PIM a été d’aboutir à la constitution d’une banque de données qui sera mise à disposition de la communauté GDR ISIS en lien avec Yannick Berthoumieu. Un focus particulier sera donné à la constitution de bibliothèques d’images hyperspectrales pour 3 problèmes particuliers.
La modélisation des phénomènes non-linéaires en imagerie hyperspectrale : un premier aspect concerne les diffusions multiples induites par la géométrie de la scène imagée. Il s’agit de concevoir un ensemble d’échantillons test réalisés avec des matériaux aux propriétés optiques connues et disposés selon une géométrie permettant de contrôler les réflexions multiples. Pour chaque objet, une image de RGB-D sera également fournie. Elle permettra d’accéder à la topographie de l’objet imagé. Un second aspect concerne l’étude des phénomènes de diffusions multiples au sein de mélanges intimes. Il s’agit de concevoir et d’imager des échantillons incluant des mélanges intimes (sables), dans des proportions contrôlées, d’un faible nombre de composés chimiques.
La modélisation et la caractérisation de textures d’images hyperspectrales d’échantillons de bois : l’objectif est de construire une bibliothèque d’images de différents types de bois qui est un matériau intéressant pour l’analyse de texture. Un focus particulier sera donné à la caractérisation des textures du duramen (bois noble) et de l’aubier (bois poreux) sur différents types d’essence. Pour chaque objet, une image de RGB-D sera également fournie. Elle permettra d’avoir une image couleur (visible) à haute résolution spatiale.
Le traitement séquentiel d’images hyperspectrales (imageur pushbroom) : il s’agit d’acquérir des données dans des conditions expérimentales variées (type et taille des matériaux, temps d’intégration, vitesse de défilement du convoyeur, pixel binning) afin d’évaluer leurs effets (flou, bruit) sur les images observées et de proposer des benchmarks pour évaluer les performances des algorithmes de traitement.
Description
La plateforme comprend quatre équipements principaux :
Caméra linéaire hyperspectrale dans le proche infrarouge (PIR). La caméra hyperspectrale fait l’acquisition
d’une ligne de 640 pixel. Pour chacun de ces pixels, l’intensité lumineuse est mesurée selon
224 longueurs d’ondes, de 935 et 1702 nm (proche infra-rouge). Un système automatisé permet de déplacer
l’échantillon pour le parcourir. L’instrument fourni ainsi un « cube » de données, l’axe spectral
s’ajoutant aux axes spatiaux usuels.
Spectromètre NIR-FT (proche infrarouge à transformée de Fourier) Bruker. le spectromètre Brucker Matrix F est un spectromètre NIR-FT (proche infrarouge à transformée de Fourier) avec option émission pour des mesures sans contact. La tête de mesure sans contact dispose de deux sources au tungstène qui illuminent l’échantillon. La lumière diffusée est récupérée et conduite jusqu’au spectromètre par une fibre optique.
Plateforme d’acquisition d’images (couleur RVB, monochrome, Scatter et 3D - obtenue par profilométrie laser) au défilé par la caméra linéaire SICK Ranger. La caméra SICK ColorRanger est une caméra linéaire à haute vitesse qui permet l’acquisition :
— d’une image couleur (13000 lignes RGB par seconde) ;
— d’une image d’intensités en niveaux de gris ;
— d’une image de diffusion d’un profil laser (image Scatter) ;
— d’une image de profilométrie 3D (35000 profils par seconde).
Le banc d’essai est muni d’un convoyeur à bande qui permet aux objets de défiler sous la caméra, et de diverses sources lumineuses : rampe à LED blanche (30W) pour l’acquisition de l’image couleur et monochrome, lasers (25 mW, 656 nm) pour l’acquisition des images scatter et 3D.
Tomographe à rayons X. Le tomographe permet l’acquisition tomo-densitométrique d’échantillons peu denses (bois, matériaux à base de fibres naturelles). Les échantillons ont une épaisseur allant de quelques millimètres à une quinzaine de centimètres selon l’axe de coupe, et une hauteur pouvant aller jusqu’à une cinquantaine de centimètres. Le tomographe fournit un cube de données selon les trois axes spatiaux, les éléments de volume (voxel) ayant une taille allant de quelques microns (pour les plus petits échantillons) à une centaine de microns (pour les plus gros).
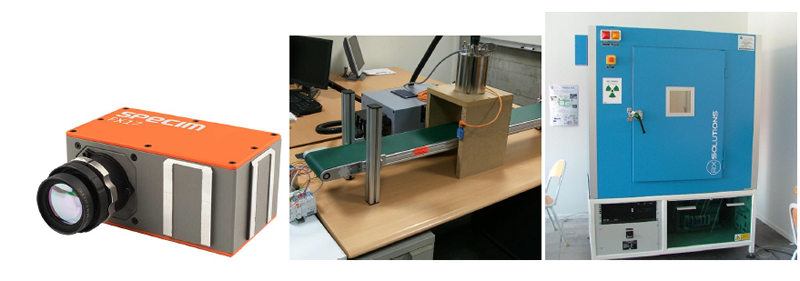 |
| FIGURE 61 – Quelques équipements : (a) caméra hyperspectrale, (b) spectromètre NIR-FT, (c) tomographe à Rayons X. |
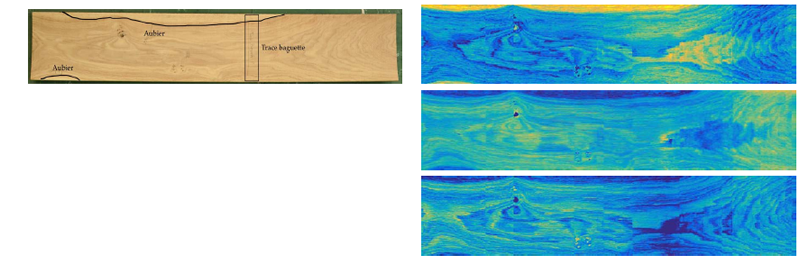 |
| FIGURE 62 – Cartes d’abondance générées par l’algorithme OMDC-ADMM pour un échantillon de chêne, numérisé par la caméra hyperspectrale Specim. La zone d’aubier est rendue visible |

